Continuous Planner
Traditionally, spacecraft have been controlled through command sequences executed from the ground. The ST6 Sciencecraft continuous planner module is an automated planning system that reduces time and effort now involved in building and carrying out commands. Even automated ground-based event planning has limited response capability, due to round-trip light times. This is the time it takes for a command to be uplinked (sent up to the spacecraft) and the response to be downlinked (a signal returned from the spacecraft).
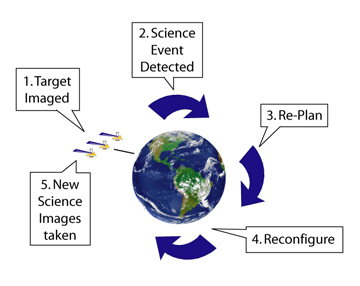 |
Sciencecraft planning process.
|
Sciencecraft's continuous planning module generates low-level command sequences from science and engineering "goals" provided by the onboard science algorithms module. The planning module's algorithms responds rapidly to these goals——"prepackaged" operations scenarios (a sequence of events) that are based on the spacecraft's capabilities. These planning algorithms enable faster recovery from spacecraft anomalies (unexpected events).




