Return to Current Site

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
 |
|
Infusion of NMP-validated Technologies into
|
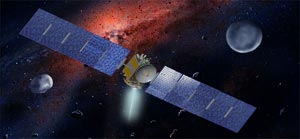 |
| Artist's concept of the Dawn spacecraft, with asteroids Vesta and Ceres. |
The Dawn mission, scheduled to launch in June 2007, will use an ion engine. This technology was validated well beyond anyone's expectations on the NMP mission Deep Space 1. Dawn, a Discovery Program project, could not carry out its mission with conventional propulsion.
 |
| Ion engine undergoes testing before Deep Space 1 launch. |
The solar electric (ion) engine technology on Deep Space 1 allowed the spacecraft to precisely shape its trajectory to meet up with asteroid Braille in July 1999 and Comet Borrelly in September 2001. The ion engine operates on a different principle from conventional chemical propulsion. It uses xenon gas as fuel, producing a force as gentle as the weight of a single sheet of paper. However, unlike conventional chemical thrusters, which are used only for orbit maneuvers, the ion engine thrusts continuously. Because in space there is no resistance from friction or drag, and only relatively small gravitational effects, the spacecraft eventually attains speeds much greater than possible with conventional engines. In addition, it is very fuel efficient, so the spacecraft can be small, with a very small "gas tank." For a more complete explanation of the ion engine, see the Deep Space 1 website.
 |
| Dawn trajectory, in which Dawn first orbits Vesta for six months, then leaves orbit to travel on to Ceres, where it will achieve a second orbit. |
Dawn will visit the two large asteroids, Vesta and Ceres, orbiting each for several months. The ion engine will allow Dawn to be captured into orbit by Vesta, then six months later, Dawn will be able to spiral away from Vesta and thrust on to Ceres, again spiraling into orbit around that asteroid.
 Read Professor Starr's Dream Trip, the story of a hypothetical scientist and how a little ion propulsion technology took him a long way.
Read Professor Starr's Dream Trip, the story of a hypothetical scientist and how a little ion propulsion technology took him a long way.
Deep Space 1 Autonmous Navigation:
Deep Impact, a NASA Discovery-class mission, was launched in January 2005 and spent the next seven months chasing down Comet Tempel 1. Why? Specifically for the purpose of placing itself--or, actually, a part of itself called the "smart impactor"--right in the path of the comet to create a collision that would blast a crater in the comet's surface. In this way, scientists could get their first look inside a comet.
Scientists knew that the surface of a comet's nucleus is blacker than coal, but theoretically, comets were "dirty snowballs." How did the surface get so black? The concept of a mission to impact a comet had been proposed decades ago, but NASA was not convinced that the impactor could actually hit a comet, especially an active one. But the Deep Impact mission was different.
On July 4, 2005, then, the Deep Impact spacecraft released its "smart impactor," to complete its first and last mission. The Deep Impact flyby spacecraft (as well as many other space- and ground-based telescopes) remained at a safe distance, taking images and spectrogaphic data to learn the composition of the plume of material blasted into space by the impactor.
So how did the smart impactor hit its target? After all, the path of an active comet is not precisely predictable. The nucleus is not spherical, so instead of rotating neatly, it may tumble like a badly-thrown football. Also, the nucleus contains pockets of gas that shoot out in jets like thrusters, pushing the nucleus this way and that.
The smart impactor succeeded because it was equipped with Autonomous Navigation, "AutoNav."
 |
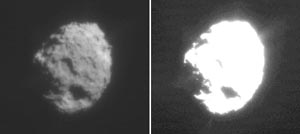
| Tempel 1 nucleus, as seen by Deep Impact impactor, showing potential impact area resulting from each Impact Correction Maneuver.
|
Along with the ion engine, AutoNav was one of 12 technologies validated on the NMP Deep Space 1 mission. AutoNav is basically a computer program full of artificial intelligence. It uses a camera to see and thrusters to steer. AutoNav guided the Deep Impact "bullet" directly to its target. Using a series of impact correction maneuvers (ICMs) in the last few minutes before impact, the impactor homed in and made a bullseye. Without those last-minute maneuvers, it would have completely missed the nucleus. Humans were 14 light-minutes away (round trip time for a signal to travel from the spacecraft to Earth and back again), so would not have been able to send correction maneuver instructions in time.
 |
| Nucleus of Comet Wild 2, as photographed by Stardust using its navigation camera from 500 kilometers (311 miles) away.
|
Another mission using AutoNav was Stardust. Stardust is the first U.S. space mission dedicated solely to exploring a comet, and the first robotic mission designed to return extraterrestrial material from outside the orbit of the Moon. Launched February 7, 1999, Stardust's primary mission was to collect dust and carbon-based samples during its closest encounter with Comet Wild 2. The rendezvous took place in January 2004. The capsule containing the samples of cometary and interstellar particles successfully returned to Earth January 15, 2006, making a soft landing in the Utah desert. Scientific analysis of the samples is under way.
A version of the AutoNav software, as modified for the Comet Borrelly encounter during Deep Space 1's extended mission, had been uplinked to the Stardust spacecraft to enable it to precisely locate the nucleus of Comet Wild 2.
Deep Space 1 Beacon Monitor Technology:
The New Horizons mission, launched January 2006, is the first mission to Pluto and its moon Charon. It has a very long cruise period ahead of it, with a planned Pluto-Charon encounter in July 2015. New Horizons is the first science mission to use the Beacon Monitor technology, one of 12 technologies validated by the Deep Space 1 mission.
| Routine downlink sends all spacecraft health measurements with each downlink, whereas Beacon Monitor technology sends a single tone indicating that all is well, or, if not, a different tone indicating the urgency for attention.
|
In beacon monitor operations, an on-board data summarization system determines the overall spacecraft health. Then it selects one of 4 radio tones to send to Earth to indicate how urgently it needs contact with the large antennas of the Deep Space Network, NASA's worldwide network of stations used to communicate with probes in deep space. These tones are easily detected with low cost receivers and small antennas, so monitoring a spacecraft that uses this technology will free up the precious resources of the Deep Space Network, thus allowing more spacecraft to explore the solar system without having to expand the network. Each tone is like a single note on a musical instrument. One tone might mean that the spacecraft is fine, and it does not need contact with human operators. Another might mean that contact is needed sometime within a month, while a third could mean that contact should be established within a week. The last is a virtual red alert, indicating the spacecraft and, therefore, the mission is in jeopardy.
Deep Space 1 validated a small deep-space transponder (SDST), built by General Dynamics, that combines the receiver, command detector, telemetry modulator, exciters, beacon tone generator, and control functions into one 3-kilogram (6.6-pound) package. The SDST allows X-band uplink and X-band and Ka-band downlink. To achieve the SDST’s functionality without a new technology development would require over twice the mass and 4 or 5 individual subassemblies.
The SDST generates the tones needed for beacon monitor operations, conceived to reduce the large demand that would be expected on the Deep Space Network if many missions were in flight simultaneously, as envisioned by NASA.
Since Deep Space 1, the Small Deep Space Transponder has been used on the Dawn, Deep Impact, Mars Odyssey, Mars Exploration Rovers, Mars Reconnaissance Orbiter, Messenger, Stereo, and Spitzer Space Telescope missions.
Space Technology 6 Autonomous Sciencecraft:
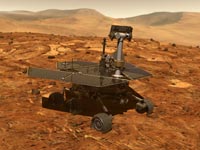 |
| Artist's concept of Mars rover on Martian surface, possibly awaiting a passing dust devil.
|
The Autonomous Sciencecraft software uses artificial intelligence to "decide" what images or data are worth taking and downlinking (transmitting back) to Earth. In this case, the sciencecraft software was uplinked to the Mars Exploration Rovers, Spirit and Opportunity, in June 2006, long after their primary mission was complete. The software enables the rovers to spot dust devils passing across the Martian surface and "know" that they are of interest so should be photographed and the images downlinked to Earth. If no dust devil is passing, there is certainly no sense in making image after image of the same, unchanging landscape, and clogging the data transmission with scientifically insignificant images.
The Autonomous Sciencecraft software was also adapted for and uploaded to the Mars Odyssey spacecraft to study the carbon dioxide ice caps, dust storms, and thermal anomalies observed from its orbit at Mars.
 |
| Artist's concept of change detection. Detection occurs during periodic observations rather than during sequential imaging.
|
As part of the NMP Space Technology 6 mission, the autonomous sciencecraft technology was uplinked to and validated by the Earth Observing 1 (EO1) spacecraft, also long after its primary technology validation mission was complete. It worked so well, that it was tried on the Mars rovers. On EO1, a primary test target was an erupting volcano, Mount Erebus, in Antartica. EO1's new sciencecraft software could detect whether the volcano was active by comparing a new image with the previous. If the software detected any slight difference, the spacecraft could be instructed to record images and other data long before humans ever knew about it. The software on EO1 was also used for flood and ice tracking, as well as imaging clouds.
EO1's baseline mission was to fly and validate three advanced technology land imaging instruments. The three instruments are the Advanced Land Imager (ALI), the Hyperion hyperspectral imager, and the Linear Etalon Imaging Spectrometer Array (LEISA) Atmospheric Corrector (LAC). These instruments incorporate revolutionary land imaging technologies that will enable future Landsat and Earth observing missions to more accurately classify and map land utilization globally.
EO-1 continues its extended mission with expanded public access to EO-1 image data and the transformation of the mission into an advanced development sensor web and testbed activity. Autonomous Sciencecraft is currently being used to automate observations planning and execution so as to significantly reduce the cost of EO-1 extended mission operations.
Space Technology 8 UltraFlex Solar Arrays:
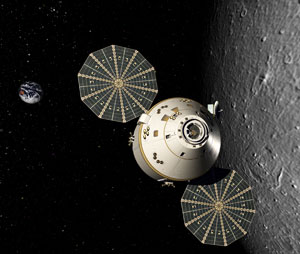 |
| Orion crew vehicle in lunar orbit. Credit: Lockheed Martin Corp. |
NASA's Exploration Systems Mission Directorate has selected a Lockheed Martin Corp. design for the new Orion crew vehicle to take humans back to the Moon and on to Mars. The baseline design uses UltraFlex solar arrays to supply electrical power to the vehicle. The UltraFlex (175 model) is one of the technologies that will be tested as part of the Space Technology 8 mission. However, NASA (and Lockheed Martin) will be watching the development of the UltraFlex for ST8 in order to benefit from the ground validation testing and then the in-space validation results.

 |
 |
 |
 |
 |